RoboticInspection
In-Pipe CrawlersNon-piggable Pipes Inspection
The challenge
Pipe leakage, cracks, and internal defects in pipelines, structures, confined spaces, and other assets are common problems in the energy sector.
New non-destructive test technologies are applied to predict and evaluate these problems.
Our solution
To meet the energy sector’s increasing demand for smart inspection tools, ouronova offers a family of remote-operated modular robots that can perform several non-destructive inspection techniques (NDT).
TATUÍ, SIMAS, and SIMÃO are a family of remote operated modular robots for performing visual, ultrasonic, wall-thickness, geometric, MFL, and other tests in non-piggable pipes. Different kinds of evaluation tests can be performed in a single run.
ouronova provides robots and inspection services, including integrity reports of the asset’s physical condition, minimizing time and resources spent on repair.
Tatuí | Simas | Simão | |
|---|---|---|---|
ID Range | 2.5” to 5” | 6” to 15” | 14” to 25” |
Visual | |||
Wall thickness | |||
ToFD | |||
MFL | |||
Geometric |
TatuíRobot
Tatuí
Robot
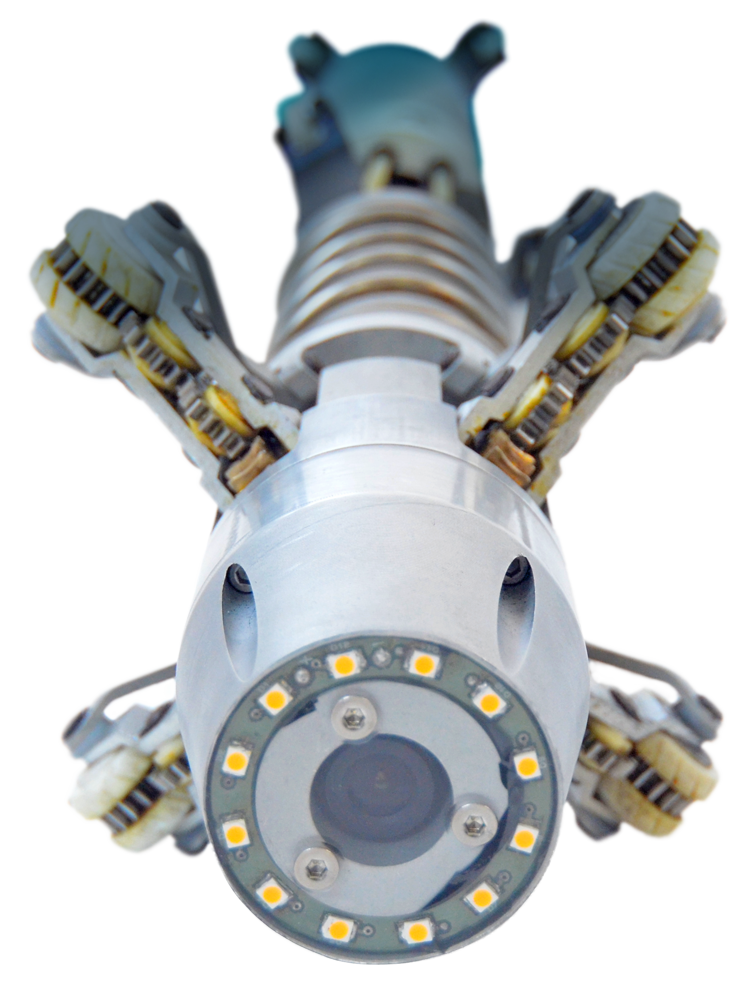
The TATUÍ was designed for use in 2.5” – 5” diameter non-piggable pipelines, focusing mainly on the demand for drilling risers.
The auto-adjustable locomotion system makes it possible to inspect multi-diameter pipelines in any direction – generating and recording images and data in real time, operating without flow pressure in the pipeline.
Main Advantages
- Bidirectional unit with speed and position control
- Real-time image recording and visualization
- Auto-adjustable multi-diameter locomotion system
- Wall-thickness evaluation
- Self-propulsion using electric motors
Tatuí
Robot
Simas
Robot

Simas
Robot
SimasRobot
This robotic system performs visual inspections and measures the height and penetration of welds alteradoand tubular structures between 6 “and 15“.
The robot features a high-definition camera with pan/tilt movement and laser projection. With its image processing technology (with a measurement accuracy to 0.03mm), SIMAS can be used to visually inspect linear and curved pipelines, including inclines.
SIMAS is modular equipment. Like its larger version, it can be coupled to various modules, such as ultrasound, geometric, and gamma-ray.
Main Advantages
- Remote visual inspection - in a specific region or 360°
- Inspection and measurement of weld root penetration height
- Inspection and measurement of discontinuity
- Inspection and measurement of the depth and length of grooves
- All inspections can be recorded with high definition video and images
Simão
Robot
SimãoRobot
This robot has remote control of speed and position and real-time data visualization and recording via an umbilical cable.
This equipment’s main characteristics are versatility and modularity. It is a powerful and innovative solution for nondestructive testing.
Main Advantages
- ToFD ultrasound module to perform weld and equipment inspections
- MFL module to perform pipeline and structure integrity inspections
- Geometric module for ovality detections and other geometric anomalies
- Wall thickness ultrasound module
- Visual module with a PTZ (Pan/Tilt/Zoom) high-resolution camera
- Other modules can be developed and attached to the robot
Simão
Robot
Get inContact
Fill in your contact information
and we’ll get back to you shortly.
Papers
DESENVOLVIMENTO DE UM ROBÔ PARA INSPEÇÃO INTERNA EM TUBULAÇÕES NÃO PIGÁVEIS (ROG 2018)
Abstract
Welding of submarine tubular structures is often a challenge for the company responsible for this task. This process must attend highly stringent standards and it is subject to various inspections to verify the compliance. Failure to comply with the standards results in reworking and, sometimes, the definitive loss of part of the structure, generating costs for the producing companies and to the executors. Once the root of the weld and the first filling layers are made, the robot is used for internal visual inspection and for measuring the height of penetration of the root of the weld. If the root of the weld presents excessive penetration (a failure to comply with the standard), the robot is able to analyze the penetration height and inform the inspector in real time. This paper presents the steps of developing a robotic vehicle to perform weld inspections of underwater tubular structures and non-piggable pipes, as well as their field tests and results
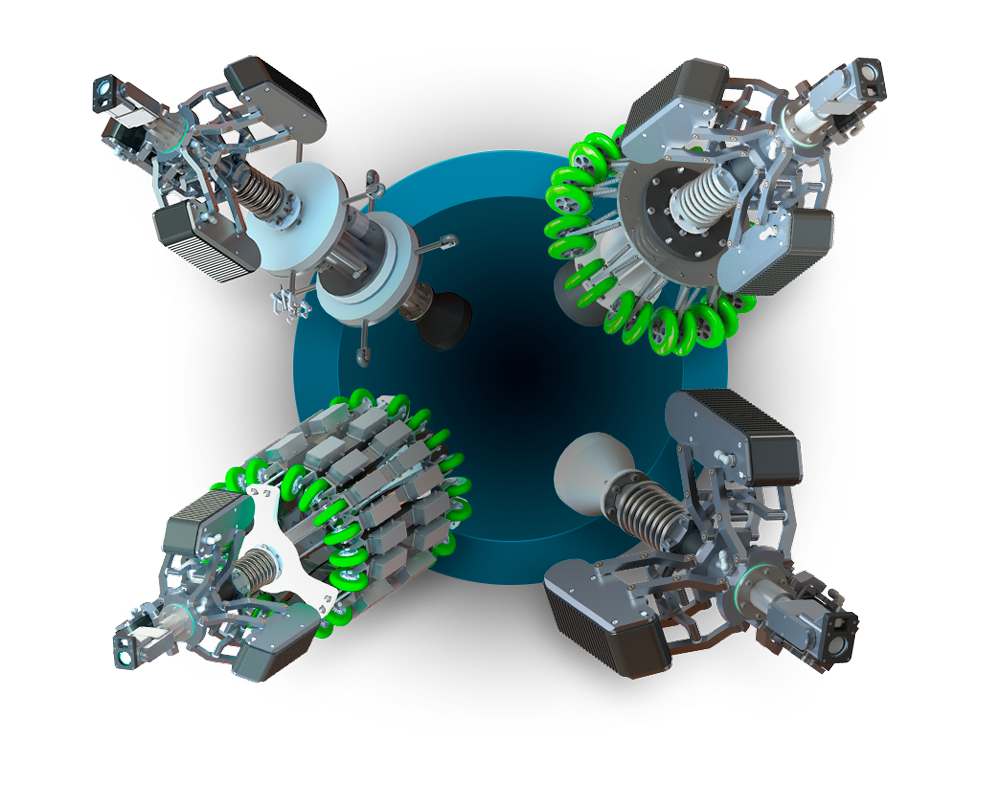
Projeto de um robô modular para inspeção de linha principal em risers de perfuração (Riopipeline 2019)
Abstract
Oil and gas drilling riser integrity has been a big concern of drilling companies for decades.Techniques used to evaluate riser integrity so far require transporting drilling risers for onshoreinspection, which generates significant logistics costs. This paper describes the developmentand evaluation of a robotic tool for offshore internal drilling riser inspection, in order to reducecosts. A hierarchical assessment methodology is proposed, where magnetic flux leakage (MFL)magnetizer and sensors are used in addition to a high-resolution camera to detect riser sectionswith a higher probability of defects such as wall thickness loss. An ultrasound probe is then positioned at the identified area to provide a more detailed analysis. This unique combinationis made possible by designing a system actuated by electrical motors, which positions both theMFL sensors and the ultrasonic probe at the same precise point to enhance the desiredassessment. The MFL magnetizer module is designed with Finite Elements to properlymagnetize the section of interest while keeping the weight as low as possible to be carried bythe robot. Multiple magnetizer configurations adapt tool to target wall thickness of the risersection, enabling a lightweight customized MFL sensor to map areas for further ultrasoundinspection. Prototype test results on a standard drilling riser with known defects are presentedin this work and evaluate the system’s ability to detect the presence of a defect as well as the precision at measuring its size. Results show that the proposed methodology has higher performance when detecting and measuring defects when compared to normative requirements.
Self-propelled robotic system for MFL inspection (Rio pipeline 2023)
Abstract
The motivation for this project was the resumption of construction of the Gasfor II gas pipeline. This project aimed to develop an autonomous robotic system capable of carrying a Magnetic Flux Leakage (MFL) inspection tool along pipeline sections with an external diameter of 20 inches, without fluid flow, with various curves and inclinations, and with a maximum length of 5 km. The project started considering the SIMÃO inspection robot and an existing MFL tool, but it was soon verified during initial tests that the necessary payload for using the tool would be much higher than the current payload capacity of the SIMÃO robotic system. Another motivating factor for the development of the autonomous system was the impossibility of using a power supply cable due to the significant voltage drop along 5 km and also due to the cable drag in the curves.The system was developed by the companies ouronova and Pipeway and tested during the construction of the TAG Gasfor II pipeline with the support of the company Norteng.
Modular robot for in-pipe inspection of nonpiggable pipelines (Rio pipeline 2019)
Abstract
Welding of submarine tubular structures is often a challenge for the company responsible for this task. This process must attend highly stringent standards and it is subject to various inspections to verify the compliance. Failure to comply with the standards results in reworking and, sometimes, the definitive loss of part of the structure, generating costs for the producing companies and to the executors. Once the root of the weld and the first filling layers are made, the robot is used for internal visual inspection and for measuring the height of penetration of the root of the weld. If the root of the weld presents excessive penetration (a failure to comply with the standard), the robot is able to analyze the penetration height and inform the inspector in real time. This paper presents the steps of developing a robotic vehicle to perform weld inspections of underwater tubular structures and non-piggable pipes, as well as their field tests and results.
DESIGN OF A MODULAR ROBOT FOR MAINLINE INSPECTION ON DRILLING RISERS (Rio pipeline 2019)
Abstract
Oil and gas drilling riser integrity has been a big concern of drilling companies for decades. Techniques used to evaluate riser integrity so far require transporting drilling risers for onshore inspection, which generates significant logistics costs. This paper describes the development and evaluation of a robotic tool for offshore internal drilling riser inspection, in order to reduce costs. A hierarchical assessment methodology is proposed, where magnetic flux leakage (MFL) magnetizer and sensors are used in addition to a high-resolution camera to detect riser sections with a higher probability of defects such as wall thickness loss. An ultrasound probe is then positioned at the identified area to provide a more detailed analysis. This unique combination is made possible by designing a system actuated by electrical motors, which positions both the MFL sensors and the ultrasonic probe at the same precise point to enhance the desired assessment. The MFL magnetizer module is designed with Finite Elements to properly magnetize the section of interest while keeping the weight as low as possible to be carried by the robot. Multiple magnetizer configurations adapt tool to target wall thickness of the riser section, enabling a lightweight customized MFL sensor to map areas for further ultrasound inspection. Prototype test results on a standard drilling riser with known defects are presented in this work and evaluate the system’s ability to detect the presence of a defect as well as the precision at measuring its size. Results show that the proposed methodology has higher performance when detecting and measuring defects when compared to normative requirements.
Robô para inspeção interna em tubulações não pigáveis (ROG 2018)
Abstract
Welding of submarine tubular structures is often a challenge for the company responsible for this task. This process must attend highly stringent standards and it is subject to various inspections to verify the compliance. Failure to comply with the standards results in reworking and, sometimes, the definitive loss of part of the structure, generating costs for the producing companies and to the executors. Once the root of the weld and the first filling layers are made, the robot is used for internal visual inspection and for measuring the height of penetration of the root of the weld. If the root of the weld presents excessive penetration (a failure to comply with the standard), the robot is able to analyze the penetration height and inform the inspector in real time. This paper presents the steps of developing a robotic vehicle to perform weld inspections of underwater tubular structures and non-piggable pipes, as well as their field tests and results.