Datasheet
DownloadPapers
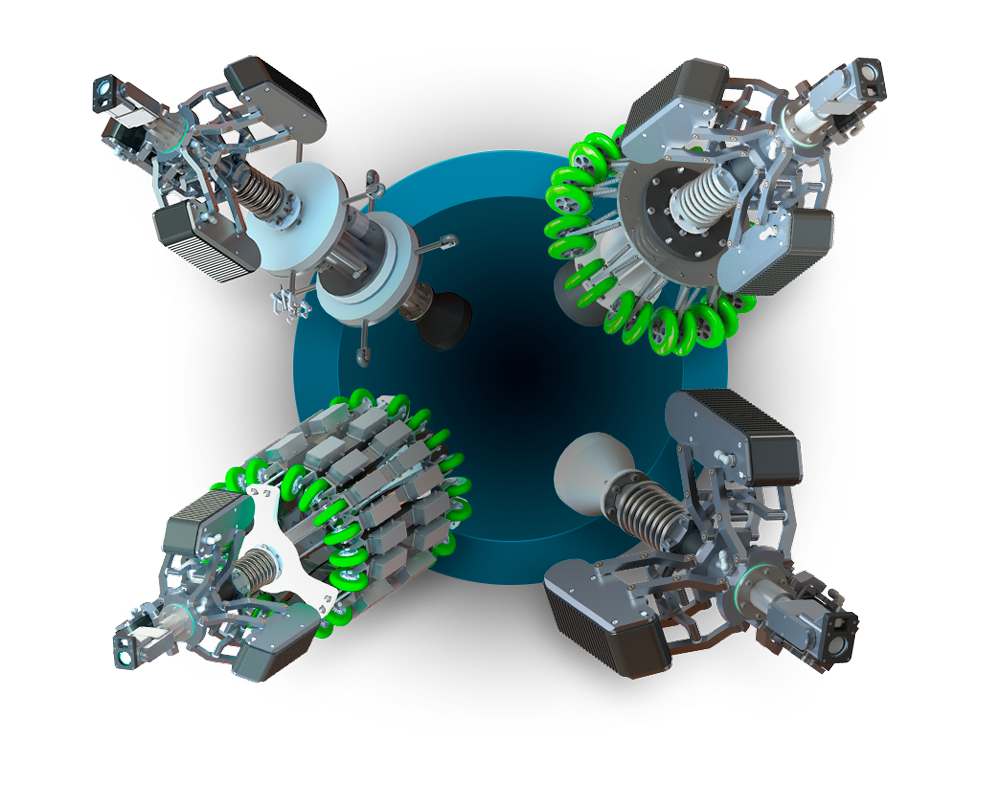
DESIGN OF A MODULAR ROBOT FOR MAINLINE INSPECTION ON DRILLING RISERS
Abstract
Oil and gas drilling riser integrity has been a big concern of drilling companies for decades. Techniques used to evaluate riser integrity so far require transporting drilling risers for onshore inspection, which generates significant logistics costs. This paper describes the development and evaluation of a robotic tool for offshore internal drilling riser inspection, in order to reduce costs. A hierarchical assessment methodology is proposed, where magnetic flux leakage (MFL) magnetizer and sensors are used in addition to a high-resolution camera to detect riser sections with a higher probability of defects such as wall thickness loss. An ultrasound probe is then positioned at the identified area to provide a more detailed analysis. This unique combination is made possible by designing a system actuated by electrical motors, which positions both the MFL sensors and the ultrasonic probe at the same precise point to enhance the desired assessment. The MFL magnetizer module is designed with Finite Elements to properly magnetize the section of interest while keeping the weight as low as possible to be carried by the robot. Multiple magnetizer configurations adapt tool to target wall thickness of the riser section, enabling a lightweight customized MFL sensor to map areas for further ultrasound inspection. Prototype test results on a standard drilling riser with known defects are presented in this work and evaluate the system's ability to detect the presence of a defect as well as the precision at measuring its size. Results show that the proposed methodology has higher performance when detecting and measuring defects when compared to normative requirements.
Contact
Get inContact
Fill in your contact information
and we’ll get back to you shortly.