WellInterventions
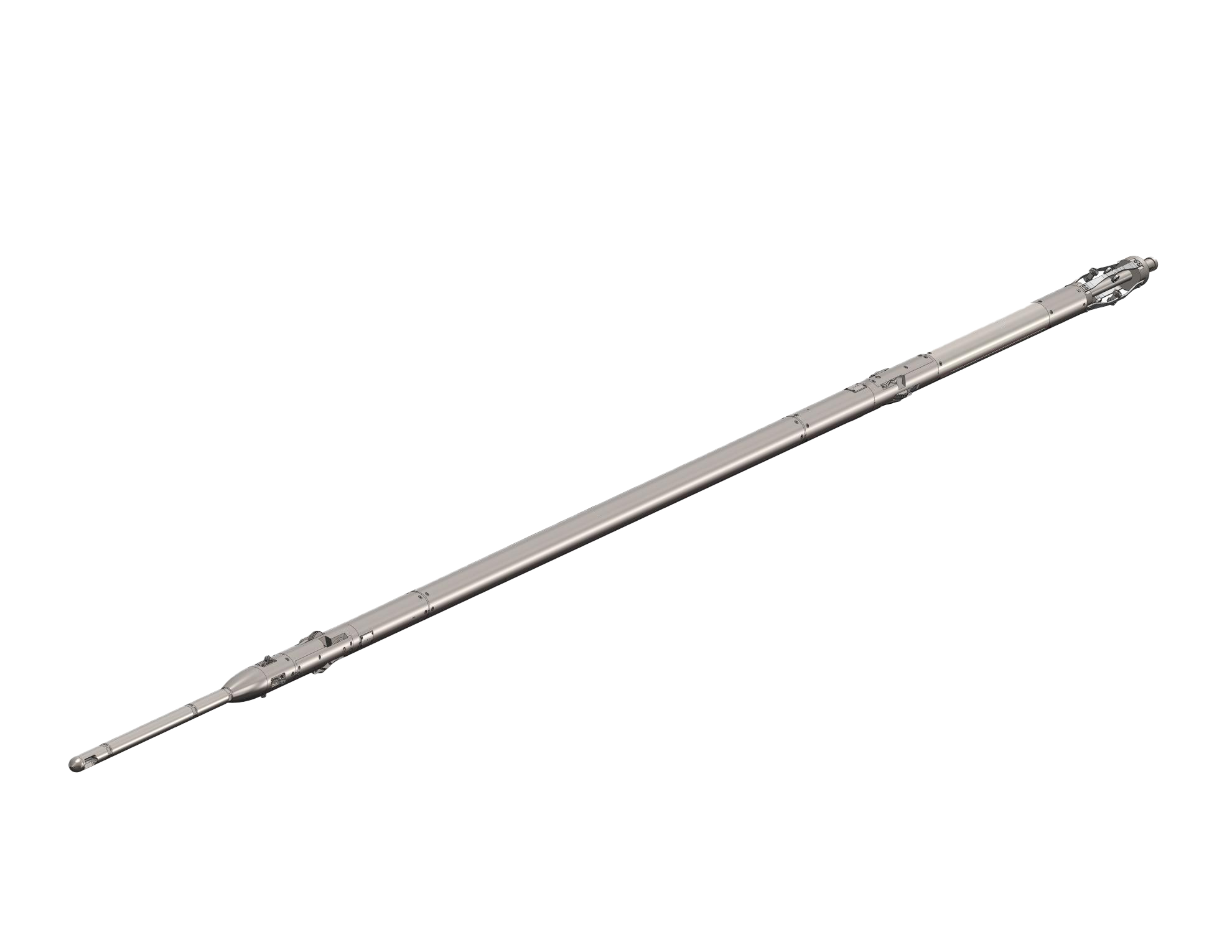
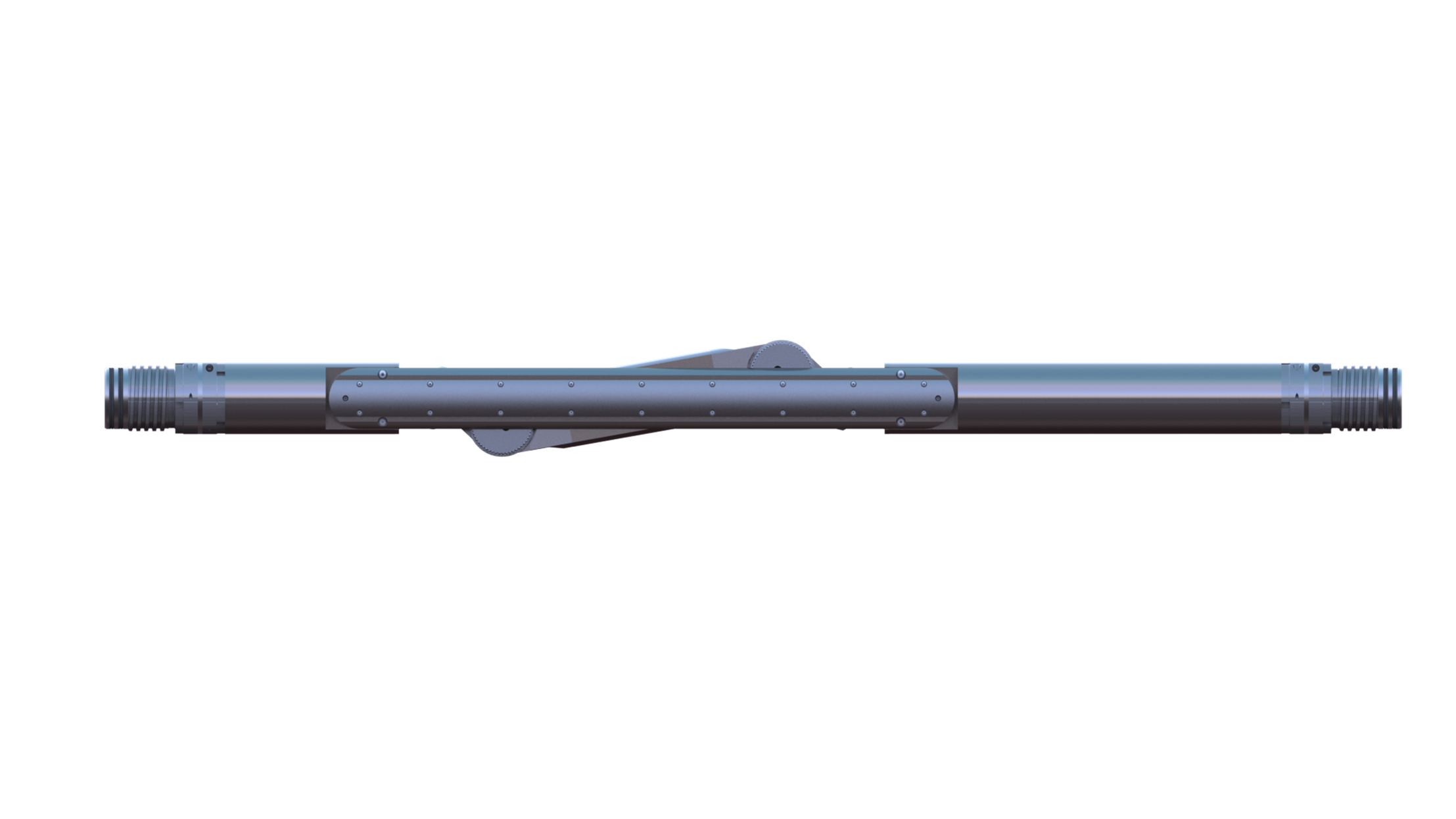
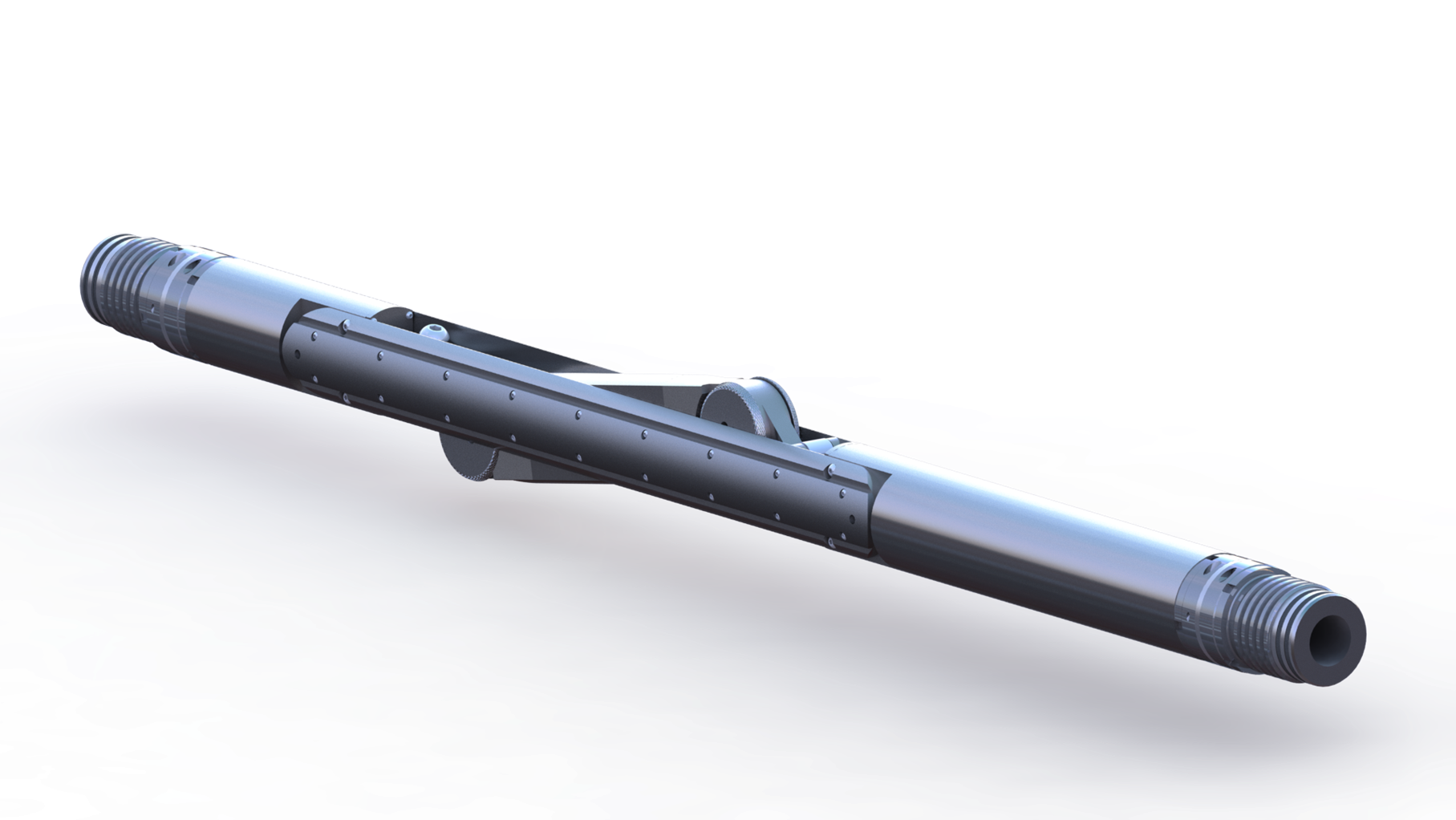
WellRobot®An autonomous robotic platform
OngoingR&D
R&D Partners
The challenge
Well intervention is often needed throughout well production. Traditional tools, such as wirelines, tractors, and coiled tubing, require production stoppage and significant crew and infrastructure deployment.
Our solution
An autonomous robotic platform reduces the cost of in-well logging and intervention services, avoiding the need for a rig. An intelligent docking station is also installed on the wellhead to collect and transmit data.
Main Advantages
- Autonomous downhole robotic platform without the need for wireline/slickline
- Multi-monitoring and multi-actuation capabilities
- No need to stop production
- Can be integrated with traditional sensors and downhole tools

Get inContact
Fill in your contact information
and we’ll get back to you shortly.
Papers
Autonomous modular robotic platform for rigless operations
Abstract
Well mechanical integrity evaluation is a crucial task in terms of cost reduction related to profiling operations, active well interventions, and also well abandonment. The current conventional techniques present high operational and logistic costs, which usually make an intervention, or even an operation for production data acquisition, impractical. The change from conventional equipment to autonomous and intelligent ones, capable of decision-making in real-time in changing and unstructured environments during an operation, is a considerable evolution for logging and intervention services.
Our equipment was developed with different types of embedded sensors, essential for measurements, on-site evaluations, and autonomous control. The control system combines different data types, such as temperature, pressure, CCL, internal diameter, and others, to feed the AI system, using sensor fusion techniques to allow autonomous decisionmaking. Besides the sensors, the modular robotic platform development allows commercial sensor adaptation, providing an operation independent from external systems such as wireline, sending the through-tubing sensors throughout the
column.
This work presents the advances in the development of a modular autonomous mobile robotic platform for through-tubing tasks. The prototype development steps, current project stages, and future works are presented. Furthermore, we detail the control and autonomous decision-making systems developed using artificial intelligence. The final version of the paper will also present simulation and test results.
PLATAFORMA ROBÓTICA PARA OPERAÇÕES RIGLESS EM POÇOS P&A
Abstract
The well´s integrity assessment provides important information for planning well´s abandonment, minimizing the costs of rig interventions. More accurate information about the status of the mechanical integrity of the production column, cladding and, cementation can reduce the uncertainty of planning the well´s abandonment operation, which results in time and resources savings in an operation that is sensitive to costs as P&A. However, the operational costs and the logistics required for the data acquisition by conventional well´s intervention end up making its realization unfeasible. In practice, wells´ abandonment (or interventions in general) ends up being planned according to the project data, interventions references that had been carrying out throughout well´s life and some inferences based on the intervention or abandonment designer experience.Performing these operations by an autonomous robot can eliminate the costs of cable profiling or flexitube units, cranes and, operation teams, in addition to enabling the execution of works without the rig need.This paper presents the development of a modular robotic platform to perform through tubing tasks without using wireline, coil tubing or slickline and, also the project´s phases, results of simulations, performed tests and, applications.
Paradigm Shift in Well Integrity Management Through the Use of Autonomous Wireless Well Intervention Robots
Abstract
Traditional techniques to evaluate well’s integrity employed for assessing mechanical integrity often come with high operational costs and logistical expenses, as they require the interruption of production or injection processes (1). Consequently, these conventional methods can be impractical and hinder overall efficiency.
However, the emergence of autonomous and intelligent intervention systems has paved the way for a significant advancement in this field. These innovative systems possess the capability to make real-time decisions in dynamic and unstructured environments. By using artificial intelligence technologies, it can autonomously evaluate mechanical integrity without human intervention.
One of the primary benefits of maintaining mechanical integrity is the assurance of safety and operational efficiency. The integrity of well structures prevents the occurrence of leaks, ruptures, or collapses, which can lead to catastrophic incidents and environmental damage. By employing autonomous and intelligent intervention systems, companies can proactively monitor the mechanical of wells, mitigating potential risks and avoiding costly operational disruptions.
These advanced systems are designed to monitor and assess critical parameters such as pressure, temperature, and flow. The real-time decision-making capability of autonomous intervention systems significantly reduces response times to potential integrity threats. By identifying issues, operators can prevent the escalation of problems and minimize associated costs. In addition to improving operational efficiency and safety, autonomous and intelligent intervention systems also offer long-term cost savings. By implementing proactive monitoring strategies, companies can optimize their resource allocation and extend the lifespan of wells. This, in turn, reduces the frequency of costly interventions and enhances overall operational profitability representing a significant leap forward in evaluating well’s integrity. By reducing the need for traditional, costly techniques and enabling real-time decision-making equipment, these systems enhance safety, efficiency, and cost-effectiveness.
Studies (2, 3) demonstrates that the utilization of RLWI (Rigless Well Intervention) systems can significantly reduce the costs associated with well intervention. Also, the utilization of robotic solutions, as example, wireline tractors have been proved as an excellent solution to improve the efficiency and reliability of well integrity (4, 5, 6).
The paper will describe the progress made in developing a modular, autonomous mobile robotic platform for through-tubing operation. We outline the stages of prototype development, current project status, and tests. We also provide details on the artificial intelligence control and autonomous decision-making systems. Finally, we plan to present simulation and field test results in the final section of the paper.